Autogyros
It is considered that the development and success of the Autogyro paved the way in making the 'true' helicopter a viable proposition. Unfortunately, once the helicopter established itself, the autogyro almost overnight became a stagnant backwater for further development.
It is only fitting that this near 'forgotten' type of aircraft is also mentioned in the RC guise on this site.
1968
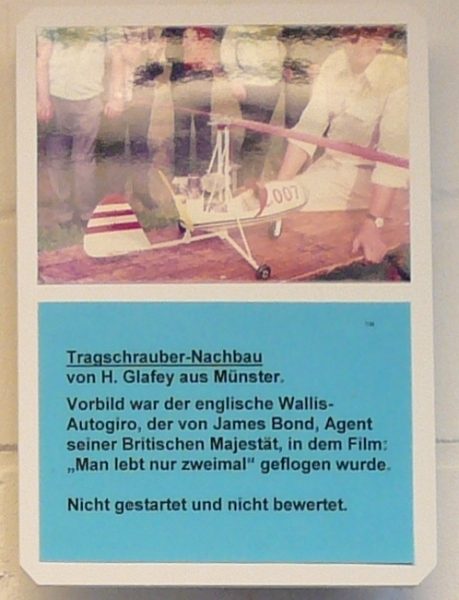
 Autogyro by H Glafey
Autogyro by H Glafey
Brought to the 1968 Harsewinkel meet but not flown as it was for helicopters only; no comment made regarding if it was a prototype or proven flyer however, given that it wasn't until the late 70's before a single rotor machine controlled by the rotor was viable I conclude it wasn't the latter.
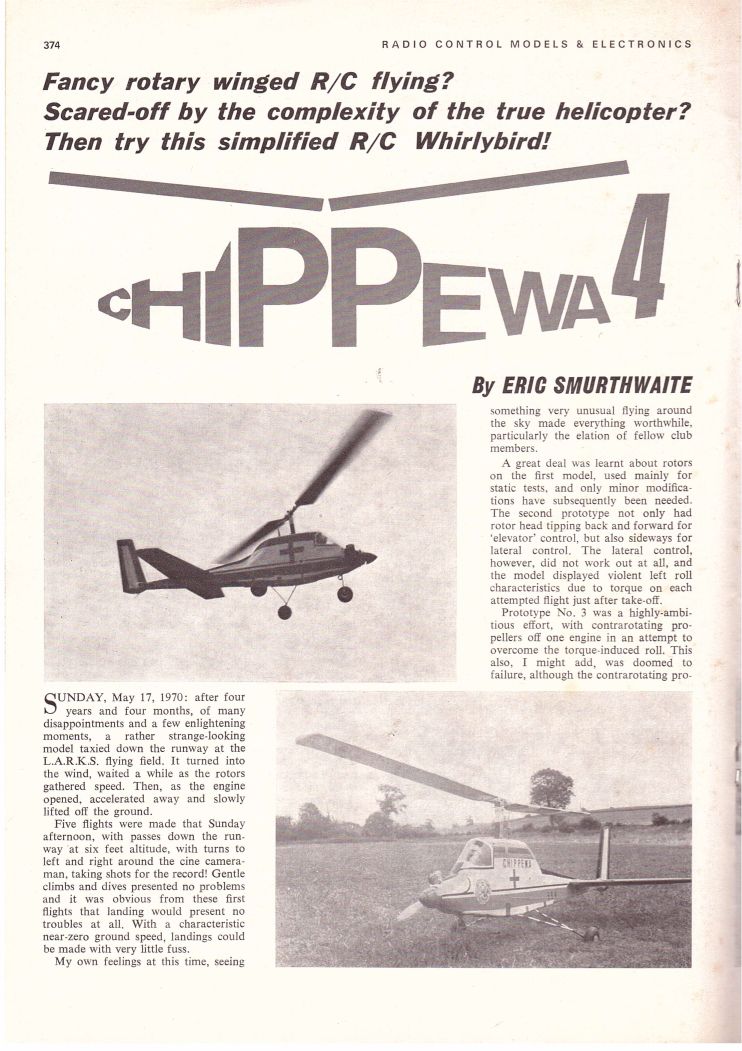
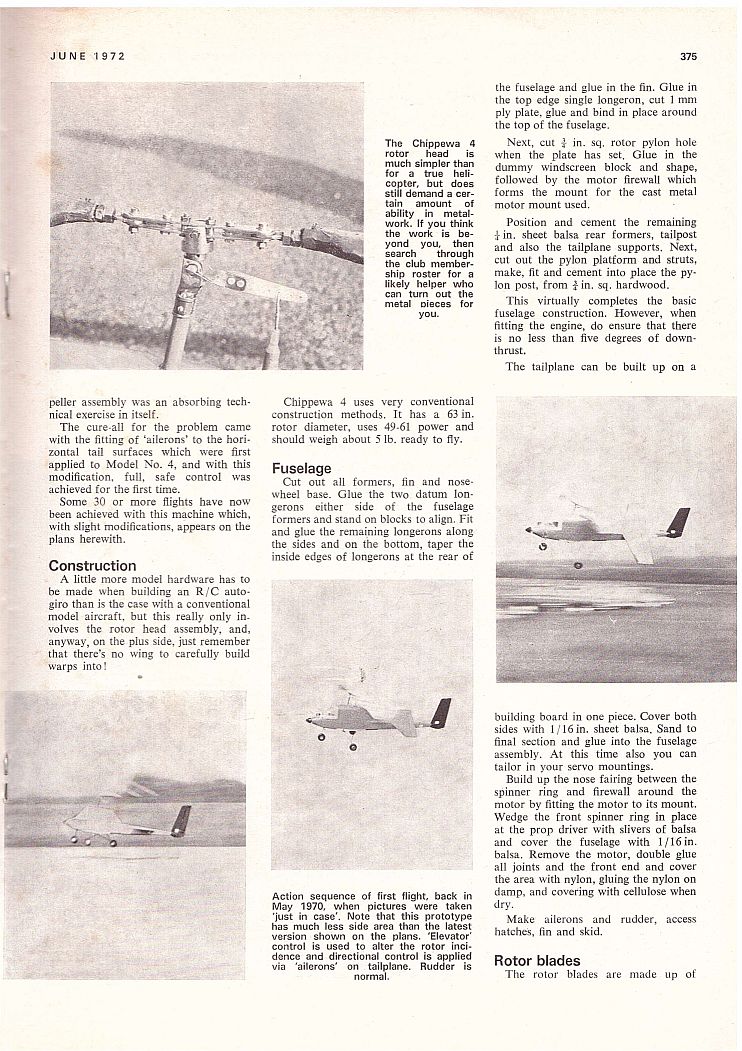
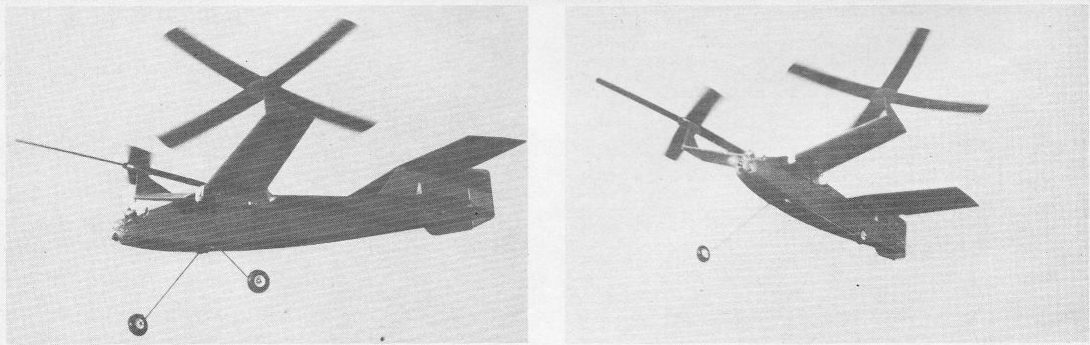
Chippewa 4 (1972)

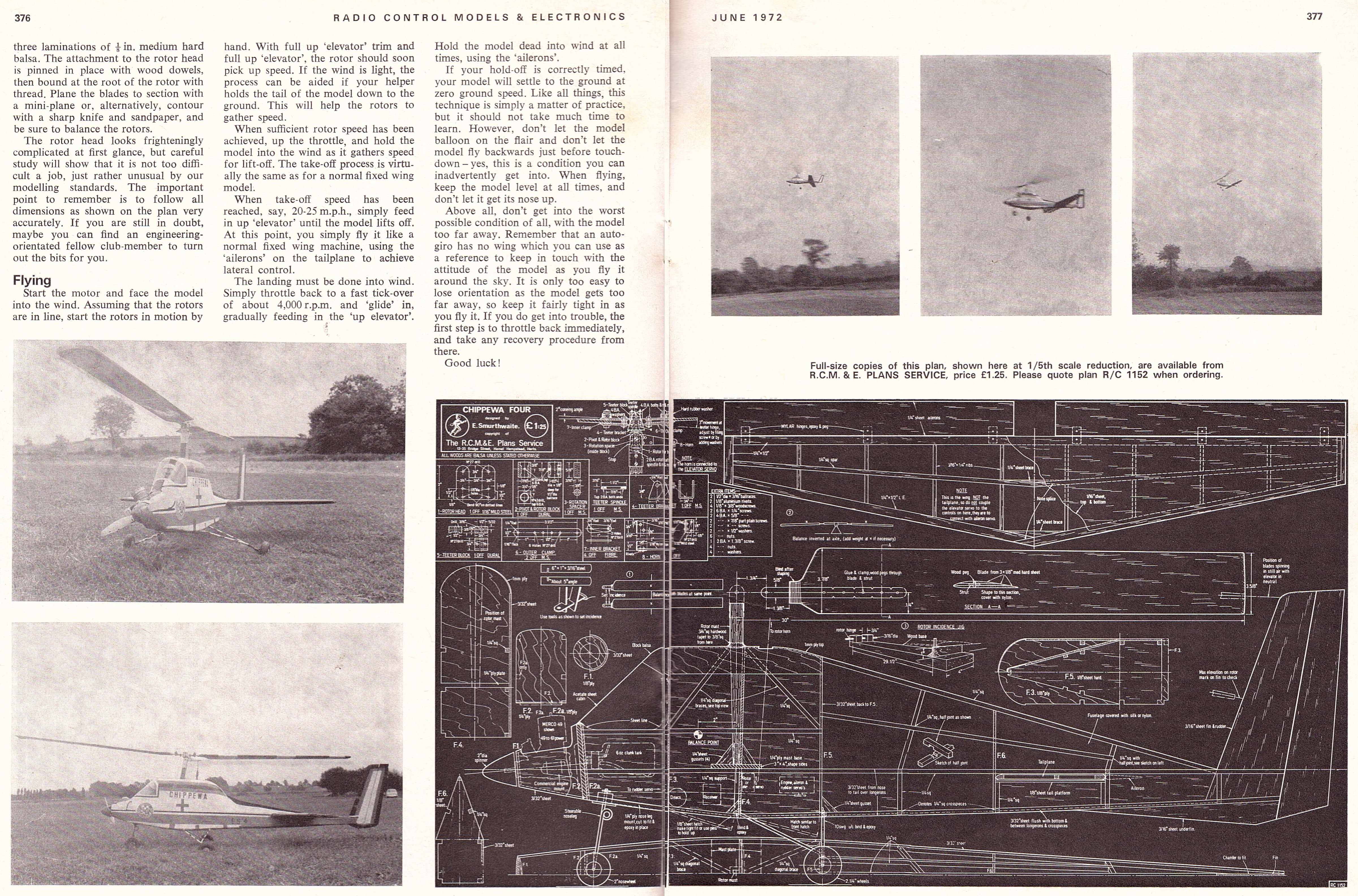 Chippewa 4 plans
Chippewa 4 plans
Presented as a plan with building and flying report in RCM&E 1972 being the forth autogyro in the designers series and had first successfully flown in 1970; fixed single rotor with 'aircraft' controls of rudder and elevator.
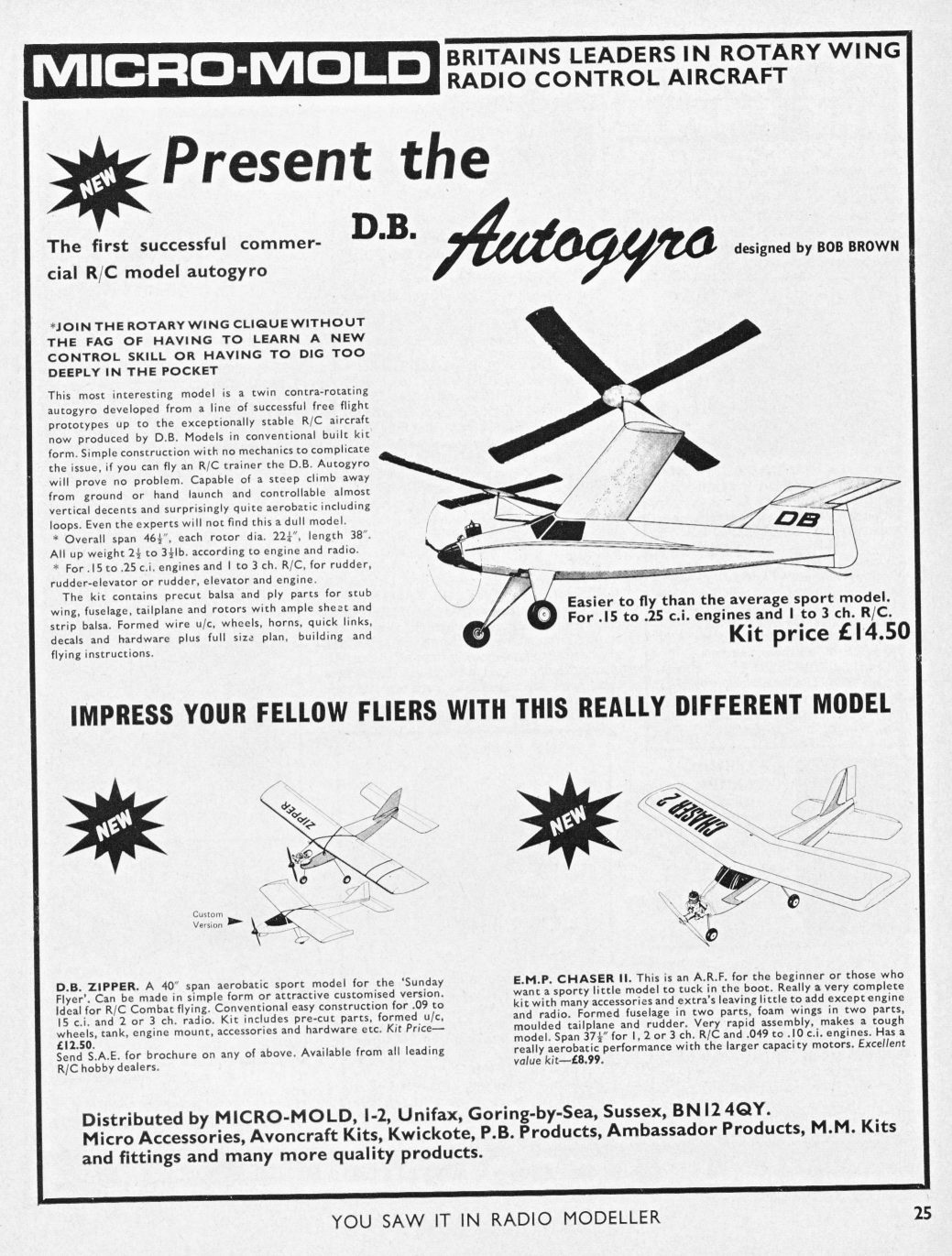
DB Autogyro (1975)
 original version
original version 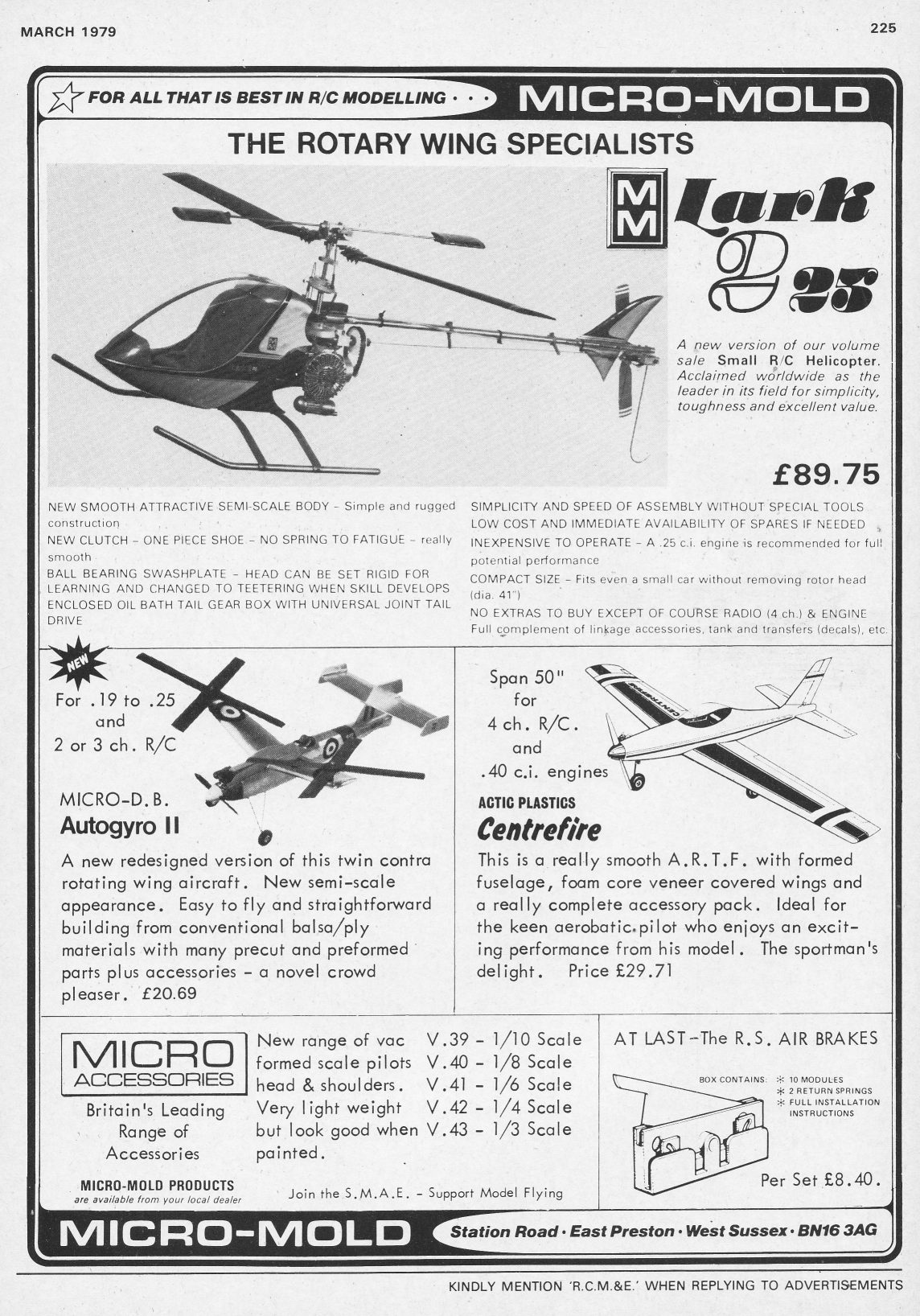 MkII version.
MkII version.
Based on a design by Bob Brown and marketed by DB models (David Boddington) in early 1975. Not a true auto-gyro as lift was enhanced by stub wings and the model had 'normal' fixed wing tail surfaces. Updated in 1979 to have a semi-scale military look.
Silverbird

An autogyro from PeAs Rotorblad in Sweden designed by Thomas Nathanson.
In 1978, Christer Björnsson wrote an article in the magazine Allt-om-Hobby using this exact orange Silverbird built by Olle Bjöklund. Probably not flown since as there are no visible repairs done to it.
The rotor head has three freeflapping unweighted blades with silicone rubber tubes that dampens the lateral swing. A design by Christina Johansson. It may seem that such an unprecise damping function would be meaningless, but without it the autogiro is almost impossible to fly. The rotor is spinning free, so the machine is controlled by the tail fin rudder together with the divided elevator also acting as aileron. The model is sensitive so be a bit careful. In order to use a regular 4-channel radio, the elevation servo is pushing the aileron servo along two rails.
The rotor was later on further enhanced by Per-Arne Johansson and Olle Lindström hence its name POLA.
As to flying, an autogyro can cope with windy days. In order to get a short take-off, the recommendation is to speed up the rotor by a battery-powered drill with smoth start function. However, do not force the machine up. If you do, it will lift the left wheel indicating that the rotor speed is too low. Just let it run another 10 meters or so and the model will come up gracefully.
In the air the autogyro behaves well, comparable to an ordinary trainer with the exception that you also have to use the throttle to control the flight. Unlike a normal fixed wing aircraft, an autogyro cannot stall. If you fly too slowly it just lose heigth. With a little practice you can land on a spot without any forward movement. Almost like a helicopter. An autogyro is no aerobatic machine, but you can loop and do not bank more than 30 deg;.
The main problem is that you many times are finding yourself alone as the other pilotes have left because of the wind.
Little Nellie